 Blogs are not websites.
Blogs are not websites.
The old school model of content creation, content consumption and content distribution does not apply to blogs. (Neither do "traditional web analytics" measures.)
For example:
- Websites are less important, it is permission marketing now (I'll give you permission and you can talk to me).
- Monologues are over, no more: I'll publish and put it out there and you'll consume and you better not complain!. It is now a dialog.
- There is no such thing are a completed page. Posts and pages are always open and always expanding.
- And my favorite, if you don't cause a "ripple" then do you exist? :)
My presentation at BlogWorld Expo was about measuring success of a blog and I started with setting the context about why blogs are different and why they present a unique measurement challenge. Some of the reasons are mentioned above.
I took the opportunity to outline Six Recommendations for Measuring Success of a Blog. Since it was all a lot of work I thought of also sharing those with you all here, after all the screenshots were done already!
All the metrics and data uses in this presentation were from this blog, so you also get to see the humble accomplishments of 17 months of blogging.
Six Tips For Measuring Success Of Your Blog:
Measure: 1) Raw Author Contribution 2) Holistic Audience Growth 3) Conversation Rate 4) "Citations"? / "Ripple Index"? 5) Cost 6) Benefit / ROI.
Here my measurement recommendations for three blogger persona types…

Let us look at each of the above six dimensions of success in detail.
[My goal is for you not only to understand what to measure, but by the end of this post if you are a Blogger or a Marketer then you'll have lots of tips on how to do this blog "thing" right. This post has many tips / best practices that have worked for me.]
# 1. Raw Author Contribution
Many people jump to measuring visitors or other metrics. My recommendation is first measuring something that will answer this question: "Do you deserve to be successful?"
One way to measure that is to compute…
Raw Author Contribution =
A] Number of Posts / Number of Months Blogging
B] Number of Words In Post / Number of Posts
I use the General Stats plugin for WordPress to measure key stats of my blog.

My Raw Author Contribution is:
A] 137 / 17 = 8
B] 224,365 / 137 = 1,638
On average eight posts per month and 1,638 words per post. Not bad, for me. Yours will depend on your own style.
Quick Tip:
The important thing it to measure: consistency. I find it builds traffic.
Plugin Tip: If you use WordPress for your blog then go get Joost's Blog Metrics Plugin. It will compute Raw Author Contribution (and Conversation Rate) for you! Thanks Joost!!
Now I'll be the first to admit that this not a measure of quality, we'll do that with 2, 3, and 4. But atleast you'll level set with yourself if you have actually contributed something that will allow you to be a success.
# 2. Holistic Audience Growth
You are talking. Is anyone listening?
The first measure of audience growth is: Onsite Audience Growth.
Use your standard web analytics tool to measure this. Google Analytics, Omniture, WebTrends, Visual Sciences, IndexTools, NetInsights, or your other favorites.
I use ClickTracks and compute Visitors (Visits) and Unique Visitors.
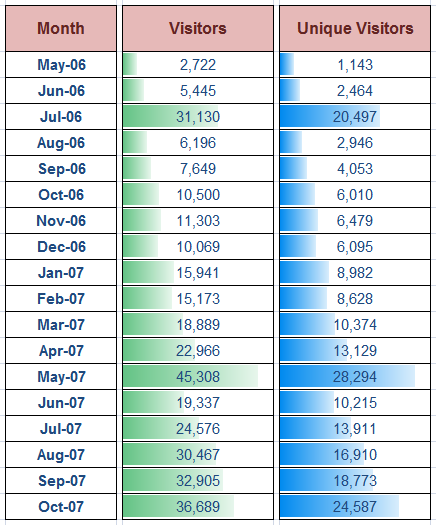
This past month this blog had 37k Visits from 25k unique visitors.
Quick Tips:
It is important to measure the trend, numbers in each month by themselves are less interesting.
It is nice to be on the home page of Digg, you can clearly see the two points above when my posts got on the home page of digg. But long term success comes from growing your core audience. You'll notice at both points above there was no impact on next month traffic from being on digg.com.
The second measure of audience growth, especially for blogs, is: "Offsite" Audience Growth aka RSS/Feed Subscribers.
I use FeedBurner, like rest of the world, and track the number of Subscribers.

Occam's Razor, a Web Analytics Blog :), had six thousand subscribers.
Quick Tips:
I love Subscribers. It is very hard to convert a Visitor into a Subscriber, someone who has now given you permission to push content to them. That extra commitment is worth a lot to me. I would take ten extra feed subscribers over a hundred visitors.
Again, please watch the trend, that line on the top of the picture. A trend up and to the right will be a reflection of you making a dent with your consistent and quality content.
Subscribers & Unique Visitors, two metrics that pass judgment on the growth of your audience.
# 3. Conversation Rate
Blogs are the most social of social mediums. As mentioned in the opening they are dialog and not a monologue.
What is your blog? A dialog or a monologue? Are you creating conversation? Have you created a social environment?
Measure that.
Conversation Rate = Number of Visitor Comments / Number of Posts
Conversation Rate for this blog is: 2,159 / 137 = 15.
You'll note from the picture above that there are a total of 2,540 comments (at the end of Oct). By my counts approximately 15% of the comments are mine, and those don't count. So just to be conservative I have eliminated 20% of the comments (around 500) when I compute Conversation Rate.
I also measure Words In Comments. You'll note above that readers of Occam's Razor have written approximately just as many words via their comments, as I have written in my posts! [Big round of applause to you all!!!]
Quick Tips:
Blogs are social and you must engage your readers to have a relationship with you, to contribute value to you, to become your evangelists. Involve them.
For me my blog is a social object. A key to having a social object is your ability to create conversation.
# 4. "Citations" / "Ripple Index"
Ok so you are talking, people are listening, and lo and behold they are talking to you on your blog as well. Hurray!!
But in a world of networks and connections what is your impact beyond your immediate blog?
A key validating factor for a blog, any blog, is that other people talk about what you are writing about. They reference back to you (with nice words or scathing critiques!). They link to you.
I call these Citations. People talk about you, discuss you point, throw up on you, praise you. Citations.
To measure Citations I use Technorati rank.
Put simply it is your place in the magnificent blogosphere at any given point compared to the one hundred million blogs that are out there.
To measure success I trend that number over time, if your rank improves that is great.
![]()
That is good progress over the last 17 odd months. Even with technorati imperfections (as with cookies in web analytics) if you look at the trend then you should be ok.
Recently though I have rethought what I was trying to measure. It is not so much that I care about "rank", ok at some level I do. I care a lot more about the ability of the blog to create conversation off my blog.
I have been toying with the idea of calling it your Ripple Index – how many blogs, cite you and link back to you over time, and is that number growing.
That drop of water is a blog post, and it causes a ripple. :)
So going forward my recommendation is to measure:
Ripple Index: Number of Unique Blogs that link to your Blog.
![]()
For now I recommend also using Technorati to measure this. Simply switch to looking at "Authority" (though I am not enamored by that, so ignore the word and use the data).
I can check links to my blog with Google if I want. I like Technorati more. Two reasons:
1] Technorati will measure other blogs linking to you, and usually not websites, I like that a lot.
2] Your unique blog links on technorati expire every six months. I really like this. You can't be a one hit wonder and have that on your resume forever. Like in Google. In Technorati computation you have to keep producing good quality content and cause "ripples". I like this aggressiveness. Its a incentive to stay on your toes.
Here is how aggressive this metric is, my Ripple Index was 1,078 at the end of Oct. It is 968 today, Nov 17th. Not nice. I have to work harder! :)
Quick Tips:
I only have one tip in this area: Be remarkable. It is hard but it is the only way.
[Tips from Seth: How to be remarkable]
# 5. Cost
Nothing in life is free. What is the cost to you of creating a great blog?
I recommend measuring three components of cost:
1) Technology (Hardware / Software)
2) Time
3) Opportunity Cost
For me technology costs are only hosting costs and the cost of domain renewal. All software I use (WordPress, BlogDesk, etc) are free to me. So…
Technology: $14.99 per month = $ 179.88 per year plus $10 domain renewal. Total = 189.88.
According to my ever vigilant wife I spend atleast 25 hours on blog related activities (writing posts, editing them, replying to all the emails I get specifically for blog posts). My time is conservatively worth $100 per hour. :) So….
Time: 25 * 4 * 12 * 100 = $120,000 per year.
Next. Especially for Businesses I recommend measuring Opportunity Cost.
If you were not blogging the resources you have put on blogging would probably do something else, something that tentatively be worth money. Opportunity cost. Say they would invent the next great patentable idea. Perhaps you would be less distracted and would have solved the Middle East crisis – potentially worth a lot. Cost that out.
If I apply this to myself: if I were not blogging I could probably do something else that would be paid work. I think for those many hours I could do something part time for a company (say analyze their reports!) and get paid $100,000 a year. So..
Opportunity Cost: $100,000.
For your business the number would be something different, try to put it on paper. See if you are better off investing in blogging (yes!! :) or better off doing something else.
[scratch late night doh! moment]
Total Cost of Blogging = 189.88 + 120,000 + 100,000 = $ 220,189.88.
Hmm….. a minimum cost of 120k, a potential max of 220k! Makes me think of this whole blogging thing in a new light.
[/scratch late night doh! moment]
What is your cost?
I realize you blog because you love. But doesn't hurt to compute cost. :)
# 6. Benefit (ROI: Return on Investment)
For every honest effort, no matter how small or big, there is a benefit, a return on your investment if you will. :)
It is important to compute what the ROI is for you as a result of your blogging efforts. Here are four different types of value to consider (values that add to your bottom line – personal or business):
 Comparative Value:
Comparative Value:
Quite simply you are working on a blog, personal or business, and if you are decent at it you might end up creating an asset that might be worth something. So compute that.
You can use the toy on the right. It is for fun but illustrates the point. It shows what the worth of this blog is using the same formulation as AOL paid for WebLogs Inc.
I don't think anyone is running to me to hand me that cash, but with your blog you create a asset and it could be worth something. ROI.
Direct Value:
You could make money off your blog. People use AdSense or one of the number of services to show ads on their blogs. Or they have a job board. Or ads in their feeds. Or consulting engagements. Or referrals to your business website. Or….
All of these things bring direct value to you, dollars! Compute these.
"Non-Traditional" Value:
Seth and Hugh and others have spoken of massive shifts in how the new world does Marketing and PR and Sales and more. About the fundamental shift from companies with mega phones and tv ads losing their grip. It is about the Customer. It is about the Conversation. It is about creating Customer Evangelists. It is about Social Objects.
Your blog facilitates this more than anything else you could do. Any business, big or small, that is not leveraging this medium in a honest attempt to have a new kind of conversation is committing a massive crime.
But if you are then compute the value created. By firing your PR agencies (who are still so lame that they send annoying email blasts to bloggers!). By saving on Super Bowl ads. By moving from White Papers to User Generated Content (Awesome Example: Gmail Behind the Scenes Video).
See the big number? That's your "non-traditional" value!
Unquantifiable Value:
A couple of weeks back I got this email:
Hi, You don't know me but I've loved your blog entries and your book. I just wanted to write and thank you. Today I was offered a job that I've been aspiring to for some time. Your writings and passion for analytics helped me gain an insight and understanding and in turn helped me secure this job. I just want to say thank you.
That is the complete email.
I wish I could tell you the happiness it brought me. Some stranger I don't know and will probably never met found some value in my blog. It touched my heart.
Unquantifiable value.
I blog because it makes me happy. I blog because I cherish the conversation with you all. I can't value it. But I know it is solid ROI. I call this a faith based initiative!
Your blog will provide you some unquantifiable value. Measure it. :)
Ok here is one more "unquantifiable value" for me.
My book, Web Analytics: An Hour A Day, came from this blog. 100% of my proceeds are donated to The Smile Train and Doctors Without Borders. It was released in June and by the end of October the book had sold enough copies for me to be able to divide up $25,000 between those two charities (even though first time authors are paid a very tiny amount of the book's selling price!).
No direct ROI to me. But unquantifiable value to me. From the blog.
I don't have any ads, I don't do PR on behalf of Web Analytics companies, I don't advertise my services or ask for business overtly or covertly. Yet my ROI I think is way over what the cost of my blog is.
That's it.
A long post that attempts to outline how you can measure success of your blogging efforts, and also hope that you picked up some tips and best practices.
Perhaps it changed your mind about this wonderful world of blogs.
Ok now it's your turn.
Please share your perspectives, critique, additions, subtractions, bouquets and brickbats via comments. Thank you.





 Via
Via 














Congratulations for this article. He is clear, easily understandable for "non-english-born" people and moreover illustrated with great example of the success of your blog. Thx
What I find bestest about this article Avinash, is more in how you expose your method to quantify a website or blog or …
Appreciating and understanding that process breakdown of yours is really valuable. To me. ;-)
I so know where you're coming from on the unquantifiable value. Both as a receiver and just this last week, as a sender. A personal thanks to the developers of an open source email list server software project. Here's how we use your product. Thanks.
Their thrilled replies back really brought home that sending that thanks was certainly the right thing to have done.
Cheers!
– Steve
PS I refuse to ask if I'm in the top 10 commenters by words. I suspect embarrassment would rapidly follow. ;-)
Amazingly informative piece, thanks for the insight. I'm going to re-evaluate my blogging and rate it on the 6 measures – maybe do a post on my blogs about it to show others the value in it.
All success
Dr.Mani
Quite fantastic that you donate the proceeds of your book (which I recently acquired).
One small detail – I think you've counted your opportunity cost twice. You worked out the value of the hours you commit to the blog, and then how much you think you could make if you do something else with those hours. These are both the same hours, so you cant really count both.
I think your ending very much reveals your true personality – you are quite surely someone who deserves the utmost of admiration. Thanks you, and well done :)
Great post. Really breaks down some metrics.
Can I give you a (humble, really) little advise?
Use the Subscribe to Comments plugin.
Is wonderful to keep the conversation growing.
Some times people left comments and forget to check back to see if there is more feedback.
This little wonder tell them: "Hey, somebody left a comment after you, want to check?"
And I can prove you (by metrics, I swear ;) ) the comments grow a lot.
If this works for you will be my (very little) "thanks" for your great content.
Avinash,
Great post. I think the value of your blog just went up a few bucks ;-). And I agree with Richard. You seem to have counted opportunity cost twice, but I think you came up with the right number anyway.
Cheers
Andy
Avinash-
Thanks for providing an insightful post on the various aspects of blog and how best to measure them.
On the 'Ripple Index', I have a question. You currently have it calculated based on the number of blog citations and link backs. I am in total agreement with the Ripple factor — but was thinking that it goes beyond just blog citations. What about referrals/citations on yahoo groups, google groups, social media etc.? The conclusion I arrived at was that whatever the metric, it has to be 'measureable' and these latter ones are difficult in that respect and so not quantifiable. Thoughts?
-Ned
Hi Avinash! Great post. I`m about to start my blog so this comes very useful. I have a few questions to ask:
1. Why are you considering hosting cost? Aren't the weblog sites supposed to host your blog at no cost?
2. Do the visits to RSS feed posts count in GA? I guess not but I'd like your confirmation.
That`s all. Thanks for the information and the inspiration!
Best regards
Hi Avinash,
Great post about Blog metrics
Best regards from Portugal
Jorge
Hi Avinash,
"2] Your unique blog links on technorati expire every six months. I really like this. You can’t be a one hit wonder and have that on your resume forever. Like in Google. In Technorati computation you have to keep producing good quality content and cause “ripples”. I like this aggressiveness. Its a incentive to stay on your toes."
I really liked reading this. Being as much into SEO as Im into (web) analytics, I often find myself thinking about the algorithms search engineers could use. One thing I was wondering just a couple of days ago is this:
Wouldnt a statistician/analyst/search engineer want to measure how valuable a website is right now? If they only look at the amount of links it has acquired over time they're not really looking at how qualitative it is right, now.
They would be doing that only if they measured at what rate during a particular period (say 6 months ago until day of measurement) a website has been acquiring links..not how many it has acquired.
Also, they'd have to take the rate of links it is attracting and divide that by something like the amount of links it already has to get an accurate picture of how many links per existing 100 links or so it is getting.
I think that would a better statistical approach to measure "quality". However, these guys at Google probably do know that and I believe they might be doing something like that already (as an additional factor they consider)..BUT the reason why they're not really aggressive with it (not at all "aggressive") must be that they're that big on trust. At least that's the only explanation I can imagine – maybe you should ask a few of your co-workers, maybe they can give write down their algorithm in detail and send it to you and you could forward that e-mail to me?
:-) j/k
…..
On another note: Ive heard that this measuring the value of your blog calculator is about as credible as online IQ tests. One of the best SEOs I know says they overestimate the value of a blog…let's call it feeding into bloggers egos…because that makes them more likely to spread the word about it. So I think I wouldnt use them in order to really try to measure the value of a blog, because theyre probably rather inaccurate – but I can tell that you were a bit skeptical about how accurate they are, anyways hehe.
…..
What you say about unquantifiable value..I find that interesting, too. I think it's very similar to what I asked you about traffic from links vs. traffic from search: Most people only look at (easily) quantifiable ROI. If search gives them 20,000 uniques it's twice as valuable than if link traffic gives them 10,000 uniques.
However search traffic (as nice as it is) is pretty volatile/a higher risk is associated with it. I think its sort of like the stock market: if youre making 10,000$ on blue chips in the same period that you could be making 20,000$ on highly volatile stocks, which option is better? It's hard to tell, but you cannot say the ROI from highly volatile stocks would be twice as valuable.
and I think the same thing is true when it comes to fun. If youre measuring opportunity cost you could say its amount of $/hour of work which counts. However if you replaced /hour with some other metric (say /amount of time doing things you don't like..taking into account how much you dont like the things you have to do) the whole thing could look completely different. Ill stop overanalyzing now!;)
Avinash, I found this article extremely useful in planning an upcoming web project of my own, and it is some of the most straightforward talk on measuring success online that I have found. I really appreciate your candor in revealing so much detail about your own blog for the benefit of others.
Even though I work for the company who publishes your book I couldn't wait for my employee discount – I had to rush right out and pay retail for it! Keep up the good work.
-Todd
You are quite on about figuring your time involved in blogging. Unfortunately for most of us, it could be a hugely insane number and we would still do it!
Hi Avinash!
We share the same first name but you are infinitely more knowledgeable than me in web analytics :-)
Thanks a lot for that blog entry.
Really great post Avinash. You are a inspiration to us in Web Analytics and to the Bloggers out there. The analysis you have done is immediately actionable and you have covered all the relevant dimensions.
The metrics for your blog are very impressive and a testament to the consistently high quality of work that you produce.
Great job and congratulations on all the success (as quantified by Subscribers, Visitors and Ripple Index!).
"I would take ten extra feed subscribers over a hundred visitors."
Do you know a way to measure how many feed subscribers actually read the blog they've subscribed to? As opposed to using an RSS subscription to "bookmark" it on their Google home page but then never reading it?
Just a little disclaimer: I have nothing to do with the authors of "Subscribe to comments", was just a suggestion :)
@Greg Moore on read vs subscribe.
Technically? No. Any method used is going to be an approximation. Even using embedded images as a form of cross check counter is iffy and whiffy.
One trick is to publish but part of an article and force people to come to the site and read the full article under your normal analytics methodology.
That has a tendency to tick people off tho. I personally would advise against it. YMMV.
I would suggest tho that if subscriber numbers keep going up? Then that is a Good Thing(tm) and *implies* that people are reading. If they go down? Inverse.
But suppose we do have some magic way of knowing how many people read a given article that's perfectly accurate. How does that HELP you do a better job?
Is a dugg article better than an un-dugg article? Popular sure, but *better* to your (site) goals? Not to say digg'ing is good or bad, rather be careful what it's telling you.
I'm a big fan of "So What?" or actionability. Sometimes numbers are cool and do good things to ones ego, but more usually you need to apply "So What". IMHO/2c etc etc etc.
???
Cheers!
– Steve
Thinking some more on this read/subscribe.
I'd suggest a (possibly poor) way to get an idea would be some sort of ratio over time (days?). # of subscribers vs # page views and/or # approx page views (via embedded images). Type of thing.
The idea being to only look over a 2-4 week period, as a starter and do a compare. As a blog becomes established, one would expect that more recent articles would have a better … number/ratio. Older ones get an advantage simply by being around longer – hence you need a way to factor those cases away.
Maybe I should sign up for a feedburner account myself just to get an idea of what they do publish. :-)
Cheers!
– Steve
On read vs subscribe….
I do think measuring the number of feed subscribers is a good idea. It might not be perfect but atleast it gives you an idea of how many want a 'permanent' relationship with your blog. Of course, there is always the pathological subscriber :-), subscribing to every blog under the sun — but never following even one.
Now on the flip side, I like the idea of somehow looking the # of readers too. Like the new vs returning visitors metric, I do think that the # of folks who come back to 'read' a blog time and again do indicate the quality of the blog.
-NK
Richard (+Andy) : Doh! Note to self: Don't write long posts at one in the night!
My apologies to everyone, and thanks so much guys for pointing this out to me. Redacted above (though still part of the permanent record!).
The right framing is: Compute your actual cost. But also compute opportunity cost and compare notes.
Ned : You are right, those are not in there becuase I don't know of a way to measure it easily (or with even 80% confidence). Until the tools catch up we use what we have, progress can't wait for tools. :)
But I really like your stress on just the "social environment", I really agree with that.
Pablo : In reply to your questions…
1) I host my blog on my own domain for SEO and branding reasons. Since its on my own host there is technology cost.
2) This is tricky. If you visit the website from the feed reader then they do count in GA. But GA has no idea how many feed subscribers you have. You could hack it to tell you how many people have clicked on your Subscribe My Blog button, but that still does not provide you with a count of Subs over time.
Jason : For all the math that is in that post I think I would still do it myself. There is something inherently about the empowerment that comes with it. :)
But here is the great thing, and I say this in most of my talks and presentations: Atleast you'll know what the data is, then you can still make a irrational choice.
It will be irrational, but informed. In my book that's 100% acceptable. :)
Greg : Yes you can. In FeedBurner look at a metric called Reach.
On Nov 13 a Reach of 1,021, the number of "people" who read my blog's feed.
In english: "On a given day how many people read a item that was sent over from my feed – the item could have been sent today or in the past".
Now not everyone will read the post on the same day so this number is highest on the day of a post and then it goes to 800 and 500 and…
I look at this number and trend it over time, watch for it to go up and to the right. :)
Thanks to the awesomeness of FeedBurner I can also see exactly what people "read":
Let me sum it up:
On Nov 13th
* there were 6,078 Subscribers to my blog
* but a total of 1,021 "people" read my blog's feed
* that readership consisted of 2,791 views of individual posts
* 1,087 of which were of my latest post (Analytics Tools Comparison) and
* as a result of that readership 231 clicks came to my website.
Is this God's gift to us? Yes.
Is it perfect? Like all of God's gifts, No.
Is it perfect enough? You bet! :)
Hope this helps.
-Avinash.
Interesting post, Avinash.
Even though I don't have a blog right now, but the concepts you talked about here will surely come in handy when I finally decide to start one ;)
-Jahangir
hey Avinash!
I've always believed that "Knowledge is only knowledge when it's shared" and i guess that's exactly what you've done..! your experience, knowledge and best practices are shared via this blog and it undoubtedly helps all analyst every level!
Keep blogging!
Cheers
Anil
Hi Avinash,
Thanks for being such a bright and inherently kind person. Enjoy reading your email, even if I am at a much lower level technically than most of your readers. A small note that the link to your book that you mention in the above: 'My book, Web Analytics: An Hour A Day' — doesn't seem to work.
Keep up the great work!
madders
Nice work Avinash. We can only hope that more folks on all sides adopt the kind of Recency screen Technorati is now using for links / Authority. As Patrick said:
Wouldnt a statistician/analyst/search engineer want to measure how valuable a website is right now?
You would think so…and track that value over time. This is vastly different than tracking "link accumulation" over time…and it's predictive! If this metric starts to slide it will continue to slide unless you take action. Not so for tracking "gross links".
I've been trying hard these past few months to fight blog envy, Avinash, and your Feedburner graph isn't helping :) Seriously, that's impressive growth (and well-deserved).
I've been thinking a lot about posting frequency and the way it seems to be diversifying across the blogosphere. I've gone from multiple posts per week to 1-2/week, but with a renewed focus on quality and the time I spend on those posts. I think some niches, like political blogs, have an up-to-the-minute quality and require frequent posting, but for other areas, there's actually such a thing as posting too often.
Hi Avinash-
You are an industry expert, and your blog is well received by everyone in the WA realm. However, I think there are also some great benefits for a younger (experience-wise) professional to put some communication out to the masses.
A young blogger has far less opportunity cost associated with their time, but they have a much "opportunity" to create. I would assume that the young blogger would spend more of their time learning, researching, and validating posts than an expert would. The social networking and personal branding that grows from a strong and consistent internet presence is also something that should not be overlooked.
Thanks much for all the time you put into your blog and your books. You have really helped me hit the ground running in the WA field. (oh, and I also like that you graduated from Ohio State)
I enjoyed your presentation at BlogWorld Expo and wanted to say thank you for posting it here, as well.
Your passion for blogging comes through loud and clear! Love it :)
The Web Analytics Association has a podcast on this topic. Hope it's OK to cite it here.
"Blog Analytics and RSS"
What are the challenges of measuring blogs? How do you measure success with blogs? How are blog metrics integrated with other web site metrics?
Interview with Paul Strupp, Corporate Analytics Manager, Sun Microsystems. (Paul blogs on Web Analytics at blogs.sun.com/pstrupp/). Interview date—July 9, 2007 by Jennifer Day with the WAA Research Committee. Time–21:19.
Link to the podcast is: http://www.webanalyticsassociation.org/en/art/?433
Great things, but boy makes me feel like a pipsqueak over at my personal blog. As it happens just before reading your post I talked about somewhat related issues in the blog community I tend to. I'm one of the "big fish" there but fall far short on your analytics. Most of the difference is the size of the pond but I wonder how much a part of it is audience. A tech blog is going to have readers who know how to subscribe to feeds and will be well-practiced and comfortable posting on unfamiliar blogs.
I know you advise looking at trends as a way to overcome this difference-of-type but I wonder how the overall analytics would differ if we were to look at blogs aimed at beginner audiences? And what about the off-topic post that brings in large Google audiences years later–the blogging culture (at least for personal blogs) gives us a little permission to stray from the standard topics and is another interesting phenomenon to look at.
Hi Avanish
I'm so glad you created this blog post from your presentation at Blog World. It really was an outstanding presentation and it was a pleasure to meet you!
I'm off to subscribe to your feed now.
Best Regards,
Sheila Beal
Hi Avinash,
Like I told you I`ve just set up a blog. I`ve opened it on wordpress and now they tell me that I can't put GA code in there. They offer me the following ShinyStat, Sitemeter, Statcounter, Activemeter.
What do you think? Are that OK?
Thank you very much for your help.
Well, your article is very helpful to me, since you present a point of view on the topic, i haven't read so far. Thank you
Avinash…question about the following quote from your blog:
"In Web Analytics: An hour A Day I use the example of Best Buy and Circuit City. You might think that they should / would / could measure their website with similar Web Metrics. Nothing could be farther from the truth.
The only thing they have in common is the fact that they sell large screen TV’s on their website. Everything else is different. Their business models, their priorities, how each tends to use the web in its multi-channel portfolio."
Specifically, how different are Best Buy and Circuit City in your mind? I am not seeing your vision of why they are completely different. Are you implying that they should not benchmark against each other? Why? Please provide a bit more detail if you can. Thanks.
Farris :
There are many differences between what each company is trying to do on their site, in context of their multi channel strategy. Just one random example is which one tries to drive you to a store vs sell you something online.
When you talk to people from each company they use their web presence in a different way. I am not implying that one does something better than the other, but that each does things differently. Hence metrics that might work for one might not work for the other. And that is ok. Find the right one and you'll be successful.
I stress that a lot in this post: Web Metrics Demystified.
Benchmarking is different. You are trying to get context to your performance. In that sense if one of your Relevant Metric is Likelihood to Recommend or Likelihood to Buy Offline then by all means compare.
It is important to first identify the Key Performance Indicators that are right for your business, then, second, find sources that provide trustable benchmarks to get context to your own performance. You'll rock, I guarantee it. :)
Hope this helps.
-Avinash.
Hi Avinash,
This was a great post, but not as good as your actual presentation at BlogWorld. :-) Your personal presence makes a real impact. Thanks for the help and advice about my blog (in the exhibit hall). I am in process of implementing.
thx,
Bari
Successful websites depend, I believe, Avinash, upon creating "meaningful" content for a designated market. There are a lot of blogs that give "useful" information, but this is repeated info from the internet, and is nothing new, just repackaged information. You really have to create something that solves a real problem, and it must be unique, otherwise, the blogger is just a parrot, who is repeating existent web content. And, over time, as you are recognized for providing such unique and resourceful information, you cannot help but achieve some kind of success. Regards, Keith Johnson
Thanks for this.
It really helps to have something concrete – and to have a way of making sense of the stats.
I do think though that we still don't have a measure of quality. All the analytics so far refer to quantity. And popularity isn't a guarantee of quality – unless Happy Birthday is the world's best song.
Would like to hear thoughts about this.
Thank you for this article. I hope it will help me in my business. There are three ways to manage your success – to point the aim, always keep trying and make a new aim when yoy got the last. I’m so glad you created this blog post from your presentation at Blog World. And by the way, try this h ttp://keybrand.ru A lot of diagrams concerning managing personal blogs.
I am in the research phase before starting a blog. Your article on blog metrics will help how I measure success. Thank you for your insights!
I just got my new blog up and running, thanks for these great tips to help me measure success (or lack there of!) moving forward. Very useful stuff.
Researching ways to improve my own blog (which, hehe, is about blog improvement). Thank you Avinash. This is extremely smart stuff. I owe you one.
This was absolutely worth the read!
One question… How do you know if your content, that is what you write about, is getting attention? Unique isn't necessarily an asset if folks don't gather around your pickle barrel to hear your latest golden nugget.
Can you write good content and still not get traffic?
Thanks
Tom
http://www.dare2believe.com
Amazing . . . .
Best Analysed .
Its clear, easily understandable. Everybody can succeed if read this article, i will sounding to every my Friend for read your good article.
Best Regard
Thx
Congratulations for this article.
Hi Avinash,
Great post.
To have people comment about how much of a help your blog has been to them is priceless!
I always look forward to your posts.
Thanks.
Ranjana
Thank you for this post. I'm sure I will refer back often as I work to increase traffic and become more consistent with my blog posts. This is a big help, and clearly well thought out.
This is really interesting! I never though of this ripple one… time to put it into practise on Success Circuit!!
This absolutely great information. Thanks for sharing.
Beautiful blog entry, and great plug-in….Understanding everything related to your blog is very important….david
Great post, very in depth. Thanks for the tips.
Great article. Tons of helpful tips and info. Putting a dollar value on your time is something many people fail to do.
this post is old but really nice, therefore i gave you a trackback from my website ;)
Thanks for sharing lots of good points.
Thanks,
Roy Peter –
Great post.
Easy to read and understandable.
Keep it Remarkable.
Thanks for inspiring my way on making old school managers that social media is worth it. It's a long way..
Dear Avinash
My name is Robert Johnson I am a 22 year old student currently attending Bournemouth University in the UK. I am in my final year of my Business Studies course and for my dissertation I have teamed up with a local hotel and created a consultancy named ‘Leisure Network Solutions’
My specific dissertation question is as follows:
Can social networks support and be integrated into the more traditional forms of online marketing within the Bournemouth hotel market?
-Specifically for the Best Western Connaught Hotel
In order to undertake this question I have set up several social networks including Twitter, Facebook, Linkedin and I am creating a Blog for the Managing Director to update.
To test the efficiency of the social networks I am going to take a 1 month sample of how bookings are originally initiated. At the end of the months I will formulate my results and come to conclusions on the beneficial output of social networks within the Bournemouth Hotel Industry.
After conducting in depth background research into the hotel industry in regards to the social networks I found out about your ingenious application available on twitter and exactly something that I should refer to and investigate further in my report.
I would love to hear what you feel about the project and any advice you could give me would be greatly appreciated. I believe that a partnership or some sort would be fantastic for my report and really give it some credibility.
Please remember that any information and all communication are strictly confidential. If you could address any email to me with the title Leisure Network Solutions that would be greatly appreciated, this is because I have to record every email as it goes towards my final grade.
Thank you for your time and I am looking forward to hearing from you soon.
Kind regards,
Robert Johnson
Leisure Network Solutions
f9095808@bournemouth.ac.uk
Would love to know the results Robert. There are considerations about the quality and usefulness of what is published via the social media. People won't respond terribly well if it is just ad's.
There is so little measurement with rigour like this around, I think your project is important and could be extremely valuable.
Good read. I wish I saw it in 2007.
Even though this was written in 2007 I find that most them are still valid.
Do you have an update to this post that includes social media metrics?
MV: I am afraid I have not had time to address this issue on the blog.
But if you want a latest blog metrics with updates then you can check our page number 257 in my new book Web Analytics 2.0 (in case you have it).
For social media metrics please check out this blog post on Twitter analytics:
~ Social Media Analytics: Twitter: Quantitative & Qualitative Metrics
-Avinash.
Great post.
Sent here by http://yoast.com which mention that they got idea from one of the excellent post written here. I agree with site. Really great work.
Thanks for some real info (that still seems relevant in 2011).
Lots of the quick research I've found only talks about visitors and ads and dollars and is about getting rich quick rather than monitoring longer term trends.
Wow that is a lot of information to take in, and I just wanted to start a blog, had no idea there was so much to consider.
I'm about to launch a blog for my business unit and started thinking about analytics. I did a Google search and came across this post. It's EXACTLY what I was looking for – guidance on how to measure the impact of the blog and identify trends over time.
Thank you!!
Great Post! You have really got me thinking about the way I blog!
I am a photographer by trade and so often get caught up with image quality, it is only starting to occur to me that while interesting it is not a conversation starter.
For my latest post I am going to try to ingage and possibly spark controversy! Subscribing & Following!
What an epic post Avinash!
Hello Avinash! Another amazing helpful post. I just read that Technorati quietly shut down its ranking system in May 2014. Given this development, do you know of another comparable source of blog popularity ranking we can take a look at?
Thanks!
http://thenextweb.com/insider/2014/06/23/technorati-quietly-killed-its-once-authoritative-blog-ranking-system-in-may/
Lea: Sadly I don't know of an alternative to the Technorati ranking system. Blogs themselves, sadly, are on their way down as an object of care and hence companies are not investing in dedicated tools and metrics.
Perhaps competitive intelligence systems, like Compete, SimilarWeb, might provide an alternative. Neither ranks only blogs, but we can identify our blog of interest, say this one, and then a few more direct competitors, and then use site rank (which uses traffic) as a proxy. Not a good one, but something.
Avinash.